Ke zhodnocení informace obsažené v obraze lze použít filtry. Již bylo zmíněno použití lineárního filtru – Fourierovy transformace, který je účinným prostředkem k oddělení signálů s neprolínajícími se spektry. Pro některé aplikace je mnohem lepší použití nelineárních filtrů. Tyto filtry se aplikují postupně na všechny body obrazu a používají váženého součtu hodnot z okolí daného bodu. Váhy v součtu jsou určeny buď maticí filtru (konvoluční filtry – ve výsledku se pak mohou objevit hodnoty, které v původním obraze nejsou), nebo jsou 1 a 0 v závislosti na relativní hodnotě pixelu (např. 1 pro maximální hodnotu, 0 pro ostatní). Rozměr matice určuje velikost okolí, které se při filtraci uvažuje.
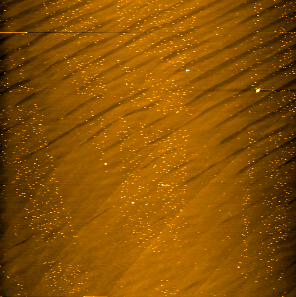
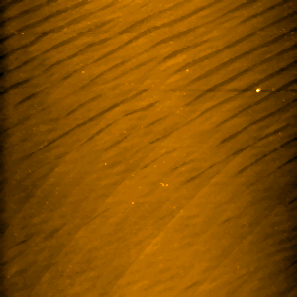
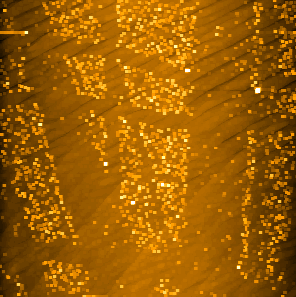
Výsledek aplikace filtru je ukázán na obrázcích výše. Obrázek vlevo představuje povrch skla, na němž jsou vidět prachové částice (s velikostí kolem 3 pixelů) a rýhovaná struktura (což může být jak struktura skla, tak artefakt). Prostřední obrázek představuje aplikaci mediánového filtru, tedy takového, který vybírá prostřední hodnotu z aktuálního okolí bodu (zde má velikost 3×3). Je vidět, že aplikace filtru vedla k zahlazení čárového artefaktu v levé horní části a k efektivnímu odstranění částic, aniž by bylo odstraněno rýhování. Tento výsledek je ovšem dán volbou velikostí okolí, pro okolí 5×5 se rýhy zahlazují. Poslední ukázkou je aplikace maximálního filtru (vybírá maximální hodnotu z okolí 3×3) na původní obrázek. Po aplikaci došlo ke zviditelnění částic (a změně jejich tvaru na čtvercový – podle okolí), ale také ke zvýraznění levé části čárového artefaktu. Naopak došlo k „zamazání“ rýh, které jsou nyní zřetelně tenčí, a pravé části artefaktu.
Mezi konvoluční filtry patří např. Gaussův filtr, který obraz rozmazává, a filtry pro detekci hran (např. Laplaceovy).