Pohybový prvek – skener – slouží jednak k realizaci jemného pohybu během vlastního měření, jednak k přiblížení hrotu ke vzorku po hrubém posuvu. Je realizován téměř výhradně piezokeramicky†, protože musí splňovat náročné mechanické požadavky (přesnost nastavení polohy δz=1 pm, δx=δy=10 pm, pohyb hrotu v ose z v rozsahu až 10 μm plynulým pohybem beze skoků), a zároveň nesmí omezovat možnosti měření (rozsah skenovacího okna od jednotek nm až 100 μm a možnost změny jeho velikosti a polohy). Zvláště s ohledem na skenovací rozsahy se používají výměnné skenery, s různým rozsahem a různou konstrukcí.
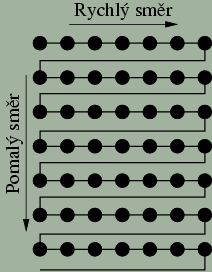 |
Při vlastním měření může skener vykonávat dvě funkce. První (používanou téměř vždy) je skenování, tedy přemísťování hrotu po zvolené rovině rovnoběžné‡ s povrchem vzorku definovaným způsobem. Zpravidla se měření provádí v pravidelném rastru, tedy polohy hrotu vytváří síť měřicích bodů (zpravidla čtvercovou, nepravidelné rastry se používají jen pro speciální účely). Pohyb hrotu je realizován po řádku v tzv. rychlém směru (fast-scan), když je hrot na konci řádku, provede se kolmý posuv v pomalém směru (slow-scan) a hrot se bez měření vrací na začátek řádku.
Druhou funkcí skeneru je pohyb kolmo ke vzorku během měření, zpravidla ve spolupráci se zpětnou vazbou k udržení konstantního signálu. V některých případech (spektroskopie sil) skener vykonává jen tento pohyb, popř. kombinaci, při které není skenování pravidelné, ale dochází jen k přesunu do předem vybraných bodů.
Mikroskopy jsou zpravidla stavěny na pevně zvolenou sadu počtu měřicích bodů na řádek i počet sloupců, mnohdy se dají skenovat pouze čtvercová okna. Velikost kroku už je však závislá na zvoleném skeneru a velikosti skenovacího okna. V základním stavu jsou osy skenované oblasti rovnoběžné s jednotlivými piezoprvky, ale elektronicky lze zajistit skenování pod libovolným úhlem.
† Pohyb lze realizovat také pomocí elektrodynamických převodníků (např. systémů z reproduktorů). Mají sice menší přesnost (asi 10 nm), ale umožní skenovat větší oblasti (až 1 mm).
‡Rovina nemusí být rovnoběžná vždy, například provedení s přikládanou hlavou používá hlavu mírně skloněnou dopředu, tím se nakloní i skenovací rovina. Častěji není rovnoběžná kvůli sklonu vzorku, vzniklému např. šikmým přilepením na podložku.