Je-li vzdálenost mezi hrotem a vzorkem tak malá, že působí odpudivé síly, dostáváme dotykový režim měření. Síla (řádově 10-7 N) se snaží ohnout nosník směrem od povrchu a pokud je tuhost nosníku menší než odpovídají tuhost, kterou drží atomy vzorku pohromadě, tak se jí to podaří a velikost ohnutí je mírou síly (pro velké ohyby není závislost lineární). V opačném případě bohužel dojde k poškození vzorku.
 |
| AFM hrot |

|
| STM hrot |
Na signálové interakci se zde podílí jen omezený počet atomů hrotu, jeho zbytek podléhá parazitním dalekodosahovým silám. V principu metoda umožňuje atomární rozlišení, ale většinou se dosahuje jen rozlišení periodicity mřížky. Důvodem je jednak rychlé skenování, které nosník na periodicitách rozkmitává, takže kupříkladu jeden chybějící atom se neprojeví (vliv setrvačnosti), jednak málo prudký pokles interakce se vzdáleností, což zvětší počet interagujících atomů, jejichž „signály“ jsou vůči sobě fázově posunuty. Na obrázku jsou ukázány rozdíly mezi AFM (nahoře) a STM (dole), velikost interakce je vyznačena stupněm šedi. V STM jde o zobrazení téměř jediného atomu, v AFM je jich více s různou silou, ale hlavně jsou vzájemně laterálně posunuty. Takže pokud máme pravidelnou řadu atomů s jednou vakancí, bude obsažena v signálu získaném z každého atomu, ale do výsledného váženého součtu, který je vztažen ke středu hrotu, bude vstupovat s různými fázovými posuvy. Tím se stane, že se vakance bude jevit nejen nevýrazná a neostře ohraničená, ale i posunutá, zatímco v pravidelné oblasti bude signál věrně periodický (pro souměřitelné struktury mřížky a hrotu). Uvedeným mechanismem je vysvětlován fakt, že hroty s poloměrem 5 nm jsou schopny rozlišit mřížky s o řád menší periodou.
Analogicky metodě STM můžeme měření provádět ve dvou režimech:
- s konstantní výškou, při níž je udržována určená hodnota výšky z0 (poloha základny nosníku)▶ a měří se ohnutí nosníku. Správně jsou zde zobrazeny struktury s frekvencí (myslí se časová, ta závisí na prostorové a rychlosti skenování) menší než je rezonanční frekvence nosníku. Přesnost závisí na kalibraci nosníku a stabilitě polohy.
- s konstantní silou, kdy se udržuje konstantní ohnutí nosníku▶ a ke skenovacímu pohybu se přidává posun vzorkem (či hrotem) ve směru osy z. Tato modifikace se používá častěji, protože se vyvarujeme závislosti prohnutí nosníku (a tím i signálu) na kapilárních silách (tedy působí-li v celé skenované ploše rovnoměrně) a pružnosti nosníku (nelinearita narušující vztah F=kΔz), je ovšem pomalejší (potřeba pohybu vzorku, závisí na odezvě zpětné vazby), pro vyšší časové frekvence zpětná vazba nestačí a vzniká nenulový chybový signál (což lze využít např. u biologických vzorků, kde je konst. síla nutná). Přesnost je určena přesností kalibrace piezokeramiky a vlastnostmi zpětné vazby.
- zřídka se používá kombinovaný režim, který používá zpětnou vazbu jen k dorovnávání výšek s nízkou frekvencí (náklon povrchu vzorku) a zbylou informaci získává z ohybu nosníku. Výhodou je rychlejší sběr dat než s konstantní silou, ale větší rozsah než u konstantní výšky.
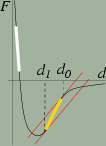 |
| Červené přímky mají směrnici rovnou tuhosti k. |
Při přibližování hrotu k povrchu na něj nejprve nepůsobí nic, pak přitažlivé síly, které nosník jen mírně ohýbají. V bodě d0, kde gradient sil překročí hodnotu tuhosti nosníku, dojde k nestabilitě a velmi rychlému přiskočení nosníku k povrchu, až do oblasti odpudivých sil. Dalším přibližováním pouze narůstají odpudivé síly. Při oddalování odpudivé síly pozvolna klesají, až do bodu d1 dosažení rovnosti gradientu a tuhosti a nosník je opět nestabilní a odskočí pryč. Vlivem minima v závislosti F–d body nestabilit nesplývají a cyklus přiblížení–oddálení vykazuje hysterezi v oblasti kontaktu.
Signál, odpovídající topografii, se získává z prohnutí nosníku směrem nahoru nebo dolů. Bohužel prohnutí nosníku může vznikat i z jiných důvodů. Jedním z nich je setrvačnost nosníku. Skenuje-li nosník ve směru své podélné osy, může při změně rychlosti docházet k jeho ohybu, který bude interpretován jako změna výšky. Je zřejmé, že takový artefakt se projevuje především na okrajích skenovacího pole a vymizí při změně úhlu skenování o 90°. Projevy artefaktu budou vzájemně inverzní v dopředném a zpětném směru.
Přídavné ohyby mohou vznikat i ze sil, které působí podél povrchu. Tyto primárně nosník zkrucují a způsobují při skenovacím směru kolmém na osu nosníku jeho ohyb ve směru kolmém k ohybu „topografickému“ (při skenování ve směru rovnoběžném s nosníkem se zkrut projevuje stejně jako topografie). Protože nosník má nenulovou šířku, dochází při zkrutu k poklesu jedné a zdvihu druhé podélné poloviny nosníku a záleží jen na detektoru a na symetrii upevnění hrotu, v jaké míře se zkrut projeví v signálu topografie.Obdobný artefakt může nastat i na topografických rysech, kde na hranách vznikají přídavné ohyby vlivem mechanického zkrucování nosníku. Podrobnější analýza, která modeluje nosník s hrotem jako dvě vzájemně kolmé úsečky délky l1 a l2 a udává velikost vlivu při skenování nakloněné roviny s úhlem Θ, ukazuje, že příspěvek mění své znaménko v bodě splňujícím podmínku tgΘ>3/2(l2)/(l1). Názorně je to vidět při skenování trojúhelníkového profilu, na jehož vrcholu se vytváří nespojitost.
Další forma uvedeného artefaktu se projevuje při měření v kapalném prostředí. Pohybem nosníku vzniká viskózní tření, závislé na směru pohybu. Projevuje se například vznikem hystereze v daleké části cyklu přiblížení–oddálení (velikost samozřejmě závisí na viskozitě kapaliny).