Elektronika, kterou musí být SPM přístroj vybaven, zahrnuje několik částí.
- Napěťové zdroje pro vlastní elektroniku.
- Generátory pro řízení piezokeramiky, které vytváří pomalý a rychlý skenovací signál. Pomalý signál může být pilovitý, ale u rychlého je to nevhodné kvůli excitacím vyšších harmonických složek.
- Vysokonapěťové zesilovače napětí pro piezokeramiku.
- Elektronické zesilovače detekovaných signálů (v STM musí mít velký dynamický rozsah) a obvody pro jejich okamžité zpracování.
- Obvod zpětné vazby
- Doplňující obvody dle typu metody (zdroj pro tunelový přechod v STM, laser v AFM, zádržné obvody pro STS, …).
- Obvody pro komunikaci s počítačem, využívající zpravidla standardní rozhraní a PC karty s DSP. Pro přenos dat a řízení je nutno používat A/D a D/A převodníky. Před digitalizací musí být signál nejprve upravován odstraněním nízkofrekvenční složky, způsobené velkým náklonem vzorku, aby nedošlo k překročení rozsahu A/D převodníku.
- Počítač pro uchovávání, zpracování a zobrazování měření.
Obvod zpětné vazby
K regulaci se zpravidla používá PID regulátor, i když derivační složka je téměř vždy nulová a proporcionální má jen omezený vliv. Nejdůležitější je tedy integrační, která zásadním způsobem ovlivňuje získaný obraz (především zákmity). Požaduje se velmi krátká odezva (omezuje rychlost skenování) a takový zisk, aby byl malý při vlastních frekvencích systému a vysoký pro nulovou frekvenci (kvalitní nastavení polohy). Zpětná vazba může být provedena i digitálně, vnáší se ovšem chyby kvantování a konečné rychlosti vzorkování, stavba je náročnější, ale je snazší případná změna režimu práce (pouze přeprogramování). Části systému se při modelování uvažují lineární a hledá se celková přenosová funkce mikroskopu.
V praxi jsou dány parametry zesilovačů a přechodu a je možno manipulovat pouze s parametry PI regulátoru tak, aby se minimalizoval chybový signál za podmínek dosažení stabilního systému (chybový signál nesmí růst s časem nade všechny meze), malé ustálené chyby a rychlé přechodové odezvy. Pro dosažení malé chyby je nutné velké zesílení, ale to snižuje stabilitu. Proto je nutno mít i integrační člen, popř. zařadit za proporcionální dolní propust. Pro rychlou odezvu je nutno použít derivační člen, který „předpovídá“ budoucí hodnoty a umožňuje rychlou reakci, ovšem za cenu snížení stability a zvětšení vysokofrekvenčního šumu (derivace → násobení ω, nutnost filtru). Použití derivačního členu navíc stěžuje analýzu, protože tíhne k řízení velkými signály, které mohou být mimo platnost lineární aproximace.
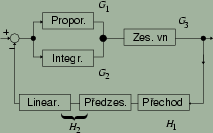 |
| Zpětná vazba v STM |
Pro případ tunelovacího mikroskopu můžeme použít následující charakteristiky:
G1(s)=(KP)/(sτP+1), G2(s)=(KI)/((sτP+1)s), G3(s)=(KZ)/(sτZ+1),
H1(s)=(ω2KT)/(s2+ωns/Q+ωn2), H2(s)=(KL)/(sτL+1),
kde Ki a τi jsou příslušné konstanty obvodu, ωn a Q charakterizují tunelový přechod a určí se experimentálně. Celkový přenos je pak dán
T=([G1+G2]G3)/(1+[G1+G2]G3H1H2).
Jediná část, která není lineární, je vlastní tunelový přechod, proto bývá jeho výstup linearizován v logaritmickém zesilovači.